
Gears & Gearboxes
Goal: Learn the fundamentals and applications of gears and gearboxes
Introduction
Why do we use gears?
The main purpose of gears is to transfer mechanical energy from one shaft to another. Gears can be used to interchange rotational speed and torque. Rotational speed is the speed at which the gear and its shaft are rotating, and torque is the rotational force the gear applies. By changing the gear ratio, you can change the rotational speed and torque of the shafts.
On our robotics team, most of our motors rotate their shafts too fast and with not enough torque for our applications. We use gears, sprockets and chain, belts and pulleys, and gearboxes to exchange speed for more torque.
Gearboxes are useful because they hold all the gears in place into one compact box. There is a picture of a gearbox attached to a motor at the bottom of the page.
Gearing can also help adjust the placement of a motor with respect to the axle you wish to rotate using idler gears, belts, etc. You will see some examples throughout the lessons.
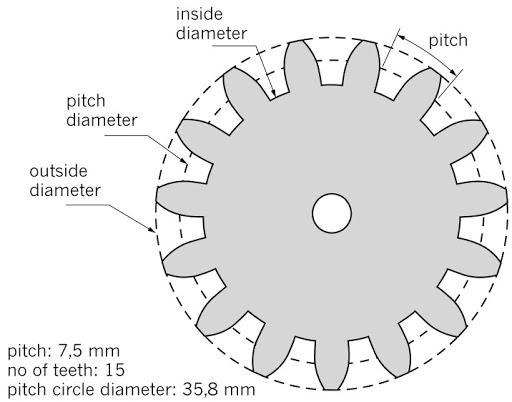
Here's a diagram of a gear:

Basics
View in order:
- Watch this Gear Introduction Video
- Go through this presentation from FRC Team 5256: Gears and Gearboxes
- Watch this video on Simple Gear System Calculations
Advanced
If you're interested, you can check out these videos from Engineers Academy:
Gears in CAD
To learn how to properly CAD gear systems on Onshape from Team 6995, check out this video
VersaPlanetary Gearbox
We use the VersaPlanetary Gearbox to cut down on the rotational speed and increase the torque for VEX motors.
To assemble the gearbox, use the VersaPlanetary User’s Guide. You can watch a quick tutorial from FRC Team 4327 here.

Attachments (2)
- Gear_Diagram.jpg (34.6 KB) - added by 5 years ago.
- VersaPlanetary_Gearbox.png (300.0 KB) - added by 5 years ago.
{kind=link}
{kind=link}
Download all attachments as: .zip